■ Un vecteur est un objet mathématique, décrit par ses trois caractéristiques et représenté par une flèche :
sa direction (la droite qui porte la flèche) ;
son sens (indiqué par le chevron de la flèche) ;
sa norme, ce qui revient à sa valeur dans le cas d'une grandeur physique vectorielle.
Position du système
La cinématique désigne la branche de la physique qui étudie les mouvements, indépendamment de leurs
causes.
Avant toute autre chose, il faut définir le système et le référentiel de l'étude. Il s'agit de la donnée
du système dont on étudie le mouvement, et de l'objet qu'on a choisi comme référence pour décrire ce
mouvement.
Par exemple, on peut choisir de décrire le mouvement d'un ballon de football dans un référentiel terrestre,
ou encore le mouvement d'un satellite de télécommunication en orbite dans le référentiel géocentrique, ou bien
le mouvement de Jupiter dans le référentiel héliocentrique.
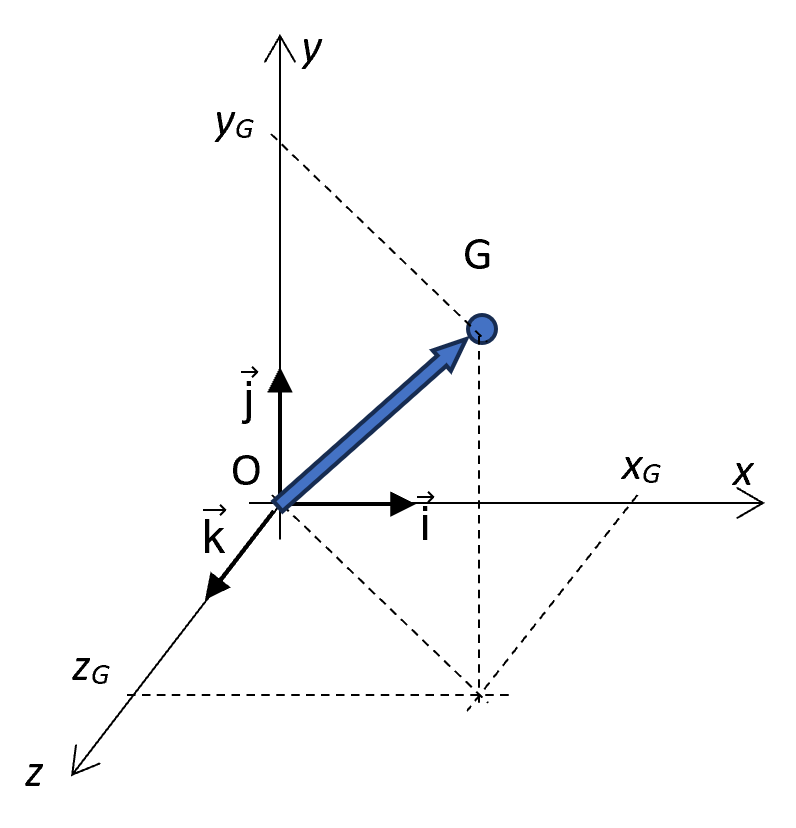
Pour étudier la position (puis les autres grandeurs), le référentiel est équipé :
d'un repère d'espace, par exemple `(O;\vec(i), \vec(j), \vec(k))`, c'est-à-dire un point
choisi comme origine et trois vecteurs unitaires le long des axes (Ox), (Oy) et (Oz) d'une étude
tridimensionnelle ;
d'un repère dans le temps, c'est-à-dire une horloge.
Repère et vecteur position
La position du système est repérée par un de ces points, par exemple le centre de masse noté G. C'est le point
où se concentrerait toute la masse du système. Il est aussi appelé centre d'inertie ou centre de gravité.
Le vecteur-position est donc donné par `\vec(OG)` à chaque instant, ce qu'on notera `\vec(OG)(t)`.
Le vecteur-position peut être décomposé dans la base vectorielle du repère, ce qui conduit à écrire:
`\vec(OG)(t)=x_G(t)\cdot\vec(i)+y_G(t)\cdot\vec(j)+z_G(t)\cdot\vec(k)`.
Ainsi, `x_G(t)`, `y_G(t)` et `z_G(t)` sont les trois coordonnées du vecteur-position dans la base
vectorielle du repère.
Il est également possible de décrire le vecteur-position à l'aide d'un vecteur colonne :
`\vec(OG)(t)((x_G(t)),(y_G(t)),(z_G(t)))`.
Comme pour n'importe quel vecteur, sa norme se calcule à l'aide de ses coordonnées selon l'expression suivante :
Ex. : il est possible de décrire la position d'un wagonnet de grand huit durant la première descente à l'aide
des lois horaires de ces trois coordonnées, ce qui donnerait par exemple :
`x_G(t)=(2,0 m/s)\cdot t` ; `y_G(t)=-(5,0 m/s^2)\cdot t^2 + 20 m` et `z_G(t)=0`.
Vecteur vitesse instantanée
Définition
La vitesse désigne, dans son sens commun, la variation de la position par unité de temps, ou plus simplement
encore, la distance parcourue par unité de temps. Au collège, la vitesse est une grandeur scalaire fournie
par le quotient `v=d/t`. En seconde, la vitesse prend un sens instantané, en étudiant le déplacement du système
entre deux points voisins M et N, rejoints pendant la durée `\Deltat` : `\vec(v)={\vec(MN)}/{\Deltat}`.
Pour préciser que les points M et N sont voisins, et que la durée est très petite, il est possible d'employer
la limite du quotient :
On peut alors identifier les trois coordonnées du vecteur vitesse :
`v_(G,x)(t)={dx_G(t)}/{dt}` ; `v_(G,y)(t)={dy_G(t)}/{dt}` et `v_(G,z)(t)={dz_G(t)}/{dt}`
Tant que l'étude du système n'est menée que sur un seul point, il sera possible d'alléger l'écriture en retirant
la lettre G (ou toute autre choisie pour le point étudié selon le cas) :
`v_x(t)={dx(t)}/{dt}` ; `v_y(t)={dy(t)}/{dt}` et enfin `v_z(t)={dz(t)}/{dt}`
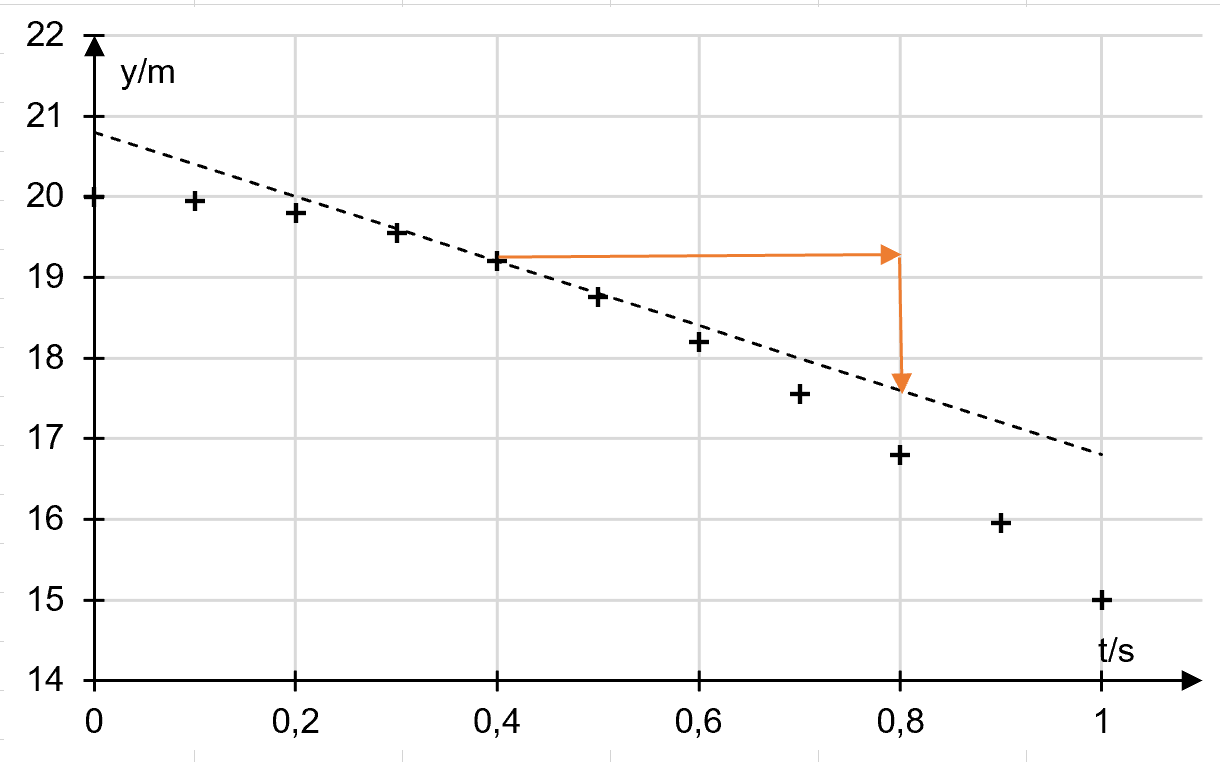
Remarque : Considérons la représentation graphique d'une coordonnée de la position au cours du temps,
par exemple `y(t)`. Nous souhaitons déterminer la vitesse verticale du système à l'instant `t=0,4 s`.
Cela est possible graphiquement : puisque la vitesse verticale est la dérivée de la coordonnée `y`
au cours du temps, nous pouvons tracer la tangente à la courbe à l'instant `t=0,4 s` et calculer la valeur
de son coefficient directeur.
Vecteur accélération
Définition
Dans le sens commun, accélérer signifie avancer de plus en plus vite. En physique, le sens est plus large :
l'accélération désigne la variation de la vitesse par unité de temps, et cela que cette variation soit positive
(la vitesse augmente) ou négative (la vitesse diminue). En termes vectoriels,
l'accélération existe dès lors qu'une au moins des caractéristiques du vecteur vitesse varie
au cours du temps : la norme change ? accélération. La direction change ? accélération. Le sens change ? accélération.
Ainsi, l'accélération est la dérivée de la vitesse
par rapport au temps. L'accélération instantanée mesure la toute petite variation de la vitesse au cours
d'une toute petite durée :
`\vec(a_G)(t)={d\vec(v_G)(t)}/{dt}`
Coordonnées et norme
En tenant un raisonnement semblable à celui mené pour les coordonnées du vecteur vitesse, nous pouvons établir
que :
`a_x(t)={dv_x(t)}/{dt}` ; `a_y(t)={dv_y(t)}/{dt}` et `a_z(t)={dv_z(t)}/{dt}`
La norme de l'accélération s'exprime en m/s2, ou toute autre combinaison d'unité de distance
divisée par une unité de durée élevée au carré.
Ex. de l'accélération de la pesanteur : `g_{Terre}=9,8 m\cdot s^-2`.
Graphiquement, le même raisonnement est possible pour déterminer une coordonnée à un instant donné du
mouvement, en partant de la représentation graphique de la vitesse au cours du temps et à l'aide de la
mesure du coefficient directeur de la tangente à la courbe à cet instant.
En reprenant l'exemple du wagonnet,
`a_x(t)=d/{dt}[2,0 m/s]=0`
`a_y(t)=d/{dt}[-10 m/s^2\cdot t]=-10m/s^2`
`a_z(t)=d(0)/{dt}=0`
Remarque : puisque l'accélération est la dérivée de la vitesse, elle-même la dérivée de la position,
alors l'accélération est la dérivée seconde de la position par rapport au temps, ce qu'on note :
`\vec(a_G)(t)={d^2\vec(OG)(t)}/{dt^2}`
`a_x(t)={d^2x(t)}/{dt^2}`
`a_y(t)={d^2y(t)}/{dt^2}`
`a_z(t)={d^2z(t)}/{dt^2}`
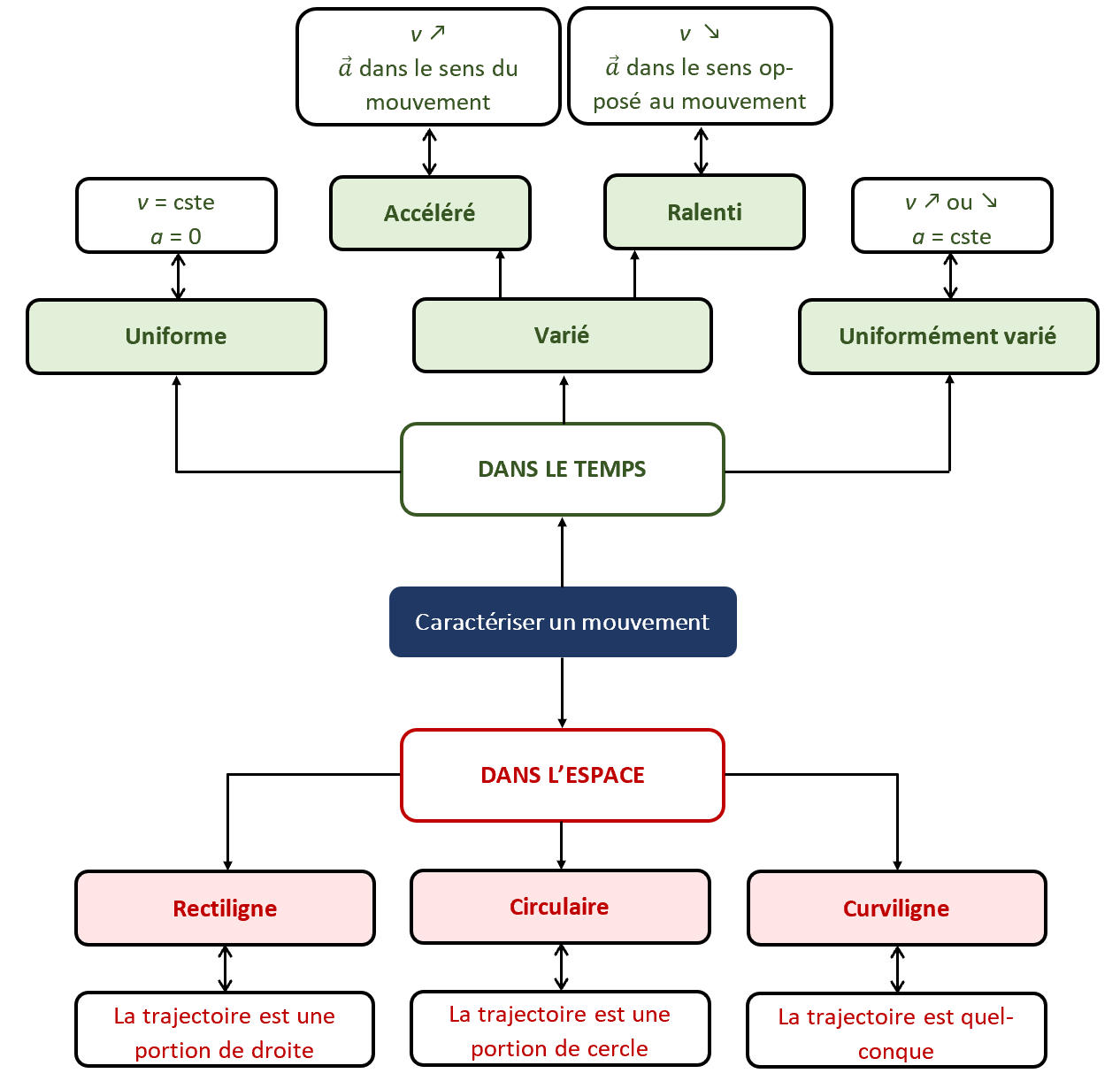
Qualifier un mouvement
Cas général
Logigramme pour qualifier un mouvement
Cas du mouvement circulaire
Base de Frenet
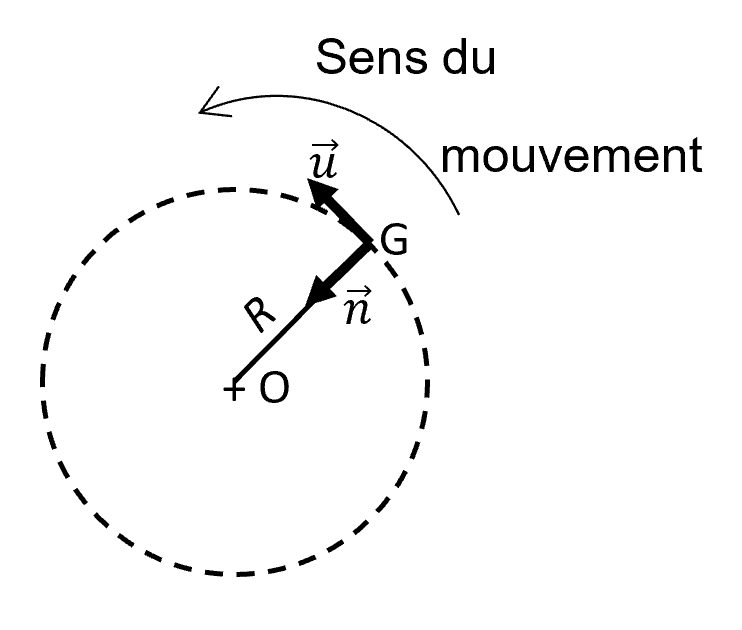
Dans le cas d'un mouvement circulaire, de rayon R, il est plus confortable de décrire
les grandeurs de la cinématique dans une base mobile, c'est-à-dire attaché au point étudié en
mouvement, qu'on appelle base de Frenet. Cette base est formée de trois vecteurs unitaires :
un vecteur `\vecu`, tangent au cercle (donc orthoradial), orienté dans le sens du mouvement ;
un vecteur `\vecn`, radial et centripète ;
un vecteur `\veck`, normal au plan du cercle, orienté vers le lecteur et non représenté ici.
Dans la base de Frenet, les vecteurs position, vitesse et accélération s'écrivent :