■ Les corps massifs s'attirent entre eux. Du fait de la masse de la Terre et de sa rotation, tous les corps
massifs à sa surface sont attirés vers son centre : ils subissent une force de la part de la Terre, appelée le poids.
Le poids, dont la norme s'exprime en newtons, est proportionnel à la masse du système, qui s'exprime en kilogrammes. Le
coefficient de proportionnalité `g` est la norme du champ de pesanteur terrestre. À la surface de la Terre,
`g\approx 9,8 N\cdotkg^-1`.
`\vecP=m\cdot\vecg`
■ Un condensateur est un système électrique composé de deux armatures (plaques) disposées l'une en regard de l'autre (en face
de l'autre) et porteuses de charges électriques opposées `q_A=-q_B`. Les deux plaques sont séparées par une couche de matériau
isolant, par exemple de l'air. Il y règne un champ électrique `\vecE`, orienté de la plaque chargée positivement vers la
plaque chargée négativement, perpendiculairement aux plaques et dont la norme est égale à la tension électrique aux bornes des
plaques divisée par la distance qui les sépare.
Toute particule chargée, porteuse de la charge électrique `q`, y subit une force électrique `\vecF` égale au produit de la charge
et du champ électrique.
`E=U/d` et `\vecF_("élec")=q\cdot\vecE`
■ L'état d'un système peut être décrit, entre autres possibilités, par ses différentes formes d'énergie, notamment
son énergie cinétique et ses énergies potentielles. Elles obéissent à deux théorèmes étudiés en première et à revoir :
le théorème de l'énergie cinétique et le théorème de l'énergie mécanique.
Dans cette partie, nous étudions le mouvement d'un système, de masse `m`, placé dans un champ de pesanteur uniforme,
c'est-à-dire qui possède en tout point de l'espace les mêmes caractéristiques (direction, sens et norme). Cela revient, sur
Terre, à considérer que le champ de pesanteur est, en tout point de l'espace étudié, vertical vers le bas et de norme égale à 9,8 N/kg. L'étude
est menée dans le référentiel terrestre, supposé galiléen durant l'étude, ce qui permet d'y appliquer les lois du mouvement
de Newton. Le système sera supposé ponctuel, nous étudions le mouvement de son centre de masse G.
3. Description de la situation initiale
Schéma de la situation initiale
La situation initiale peut varier d'une étude à l'autre : ballon posé au sol, objet lâché d'un balcon,
ballon lancé vers un panier, etc. Nous choisissons ici de traiter ce dernier exemple. Nous munissons pour cela
l'espace d'un repère `(O\ ; \veci, \vecj,\veck)`, l'axe (Oy) étant vertical ascendant (voir figure). Le
repère est également muni d'une horloge, l'instant `t=0` correspond à l'instant où le ballon est
tout juste lancé, abandonné à son mouvement.
Le système {ballon} se trouve initialement sur l'axe (Oy) à une hauteur `H` au-dessus du sol. Ainsi, le vecteur
position initial s'écrit `\vec(OG)_0 ((0),(H),(0))`.
Le ballon étant lancé, il lui est communiqué une vitesse initiale `\vec(v_0)` contenue dans
le plan (Oxy) et formant un angle `\alpha` avec
l'horizontale : `\alpha=(\vec(i),\vec(v_0))`.
Coordonnées du vecteur vitesse initiale
À l'aide de considérations géométriques, menées dans le triangle GKL rectangle en K, nous pouvons écrire que :
Une fois abandonné à son mouvement, le système est soumis à différentes actions :
l'action de la Terre, modélisée par le poids `\vecP=m\cdot\vecg` ;
les éventuelles actions de l'air : frottements `\vecf`, poussée d'Archimède `\vec(\pi)`.
L'hypothèse est formulée que ces dernières sont négligeables devant le poids : `f≪P` et `\pi≪P`.
Ainsi, le système n'est soumis qu'à son poids durant toute l'étude : on parle de chute libre.
Ces termes sont aussi valables quand le système s'élève, pourvu qu'il ne soit soumis qu'à son poids. Cela reste
vrai tant qu'aucune autre action extérieure n'intervient (contact avec le sol, avec un joueur, avec un mur, etc.).
Nous savons donc précisément comment l'histoire débute. Nous allons exploiter la loi de Newton, qui est une loi
d'évolution, pour comprendre comment l'histoire se poursuit.
5. Principe fondamental de la dynamique (PFD)
D'après le principe fondamental de la dynamique,
`\Sigma\vec(F_(ext))=m\cdot\vec(a_G)(t)`
soit ici,
`\vecP=m\cdot\vec(a_G)(t)`
donc, d'après l'expression du poids,
`m\cdot\vecg=m\cdot\vec(a_G)(t)`
Simplifions membre à membre par la masse :
`\vec(a_G)(t)=\vecg`
Ainsi, tous les systèmes en chute libre, qu'ils soient lourds ou légers, gros ou petits, ont la même
accélération, c'est l'accélération de la pesanteur, égale à 9,8 m/s2.
Pour déterminer les coordonnées du vecteur accélération, il faut projeter le vecteur sur chacun des
trois vecteurs de la base du repère. Comme `\vecg` est un vecteur vertical et vers le bas, nous pouvons
écrire que `\vecg=-g\cdot\vecj`. Alors,
`\vec(a_G)(t)((0),(-g),(0))`
Notons que ces coordonnées gardent la même valeur au cours du temps. Il n'est donc pas utile d'écrire
`\vec(a_G)(t)` et `\vec(a_G)` suffit : `\vec(a_G)=\vec(cste)`.
Le long de l'axe (Ox), `a_x=0` donc il n'y a pas d'accélération : le mouvement sur cet axe sera uniforme.
Le long de l'axe (Oy), `a_y=-g`, le mouvement sera uniformément varié.
Le long de l'axe (Oz), `a_z=0` donc il n'y a pas d'accélération : le mouvement sur cet axe sera uniforme.
6. Équations horaires de la vitesse du système
Nous nous souvenons que `a_x={dv_x(t)}/{dt}`, et de même pour y et z. Ainsi, nous pouvons écrire que
`{dv_x(t)}/{dt}=0`
`{dv_y(t)}/{dt}=-g`
`{dv_z(t)}/{dt}=0`
`v_x(t)` est donc une fonction mathématique du temps qui, quand on la dérive, donne `0`. Il faut donc que `v_x(t)=C_1`
où `C_1` est une grandeur constante dans le temps. Nous vérifions en effet que `{dC_1}/{dt}=0`.
`v_y(t)` est une fonction mathématique du temps qui, quand on la dérive, donne `-g`. Il faut donc que
`v_y(t)=-g\cdot t+C_2` où `C_2` est une grandeur constante dans le temps. Nous vérifions en effet que
`d/{dt}[-g\cdot t +C_2] = -g`.
`v_z(t)` est donc une fonction mathématique du temps qui, quand on la dérive, donne `0`. Il faut donc que `v_z(t)=C_3`
où `C_3` est une grandeur constante dans le temps. Nous vérifions en effet que `{dC_3}/{dt}=0`.
Ainsi,
`\vec(v_G)(t)((C_1),(-g\cdot t+C_2),(C_3))`
Exploitons les conditions initiales pour déterminer les valeurs de ces trois constantes.
Ces coordonnées sont vérifiées à chaque instant. En particulier, à l'instant `t=0`. Si nous réécrivons ces
coordonnées en remplaçant `t` par `0`, nous obtenons
`vec(v_G)(t=0)((C_1),(C_2),(C_3))`
Or nous avons établi dans la description initiale de l'étude que
En comparant ces deux écritures, nous pouvons identifier que
`C_1=v_0\cdot cos(\alpha)`
`C_2=v_0\cdot sin(\alpha)`
`C_3=0`
Ainsi, à tout instant `t>=0`,
`v_x=v_0\cdot cos(\alpha)`
`v_y(t)=-g\cdott+v_0\cdot sin(\alpha)`
`v_z=0`
Ce sont les équations horaires des coordonnées du vecteur vitesse à tout instant de la chute libre.
Nous vérifions bien, comme annoncé, que le mouvement horizontal est uniforme (`v_x=cste`).
7. Équations horaires de la position du système
Nous nous souvenons que `v_x={dx(t)}/{dt}`, de même pour y et z, donc
`{dx(t)}/{dt}=v_0\cdotcos(\alpha)`
`{dy(t)}/{dt}=-g\cdott+v_0\cdot sin(\alpha)`
`{dz(t)}/{dt}=0`
`x(t)` est donc une fonction mathématique du temps qui, quand on la dérive, donne `v_0\cdotcos(\alpha)`. Alors
`x(t)=v_0\cdotcos(\alpha)\cdott+C_4`. Vérifiez en dérivant par rapport au temps.
`y(t)` est une fonction mathématique du temps qui, quand on la dérive, donne `-g\cdott+v_0\cdot sin(\alpha)`.
Alors `y(t)=-1/2\cdot g \cdot t^2 + v_0 \cdot sin(\alpha)\cdot t + C_5`.
`z(t)` est une fonction mathématique du temps qui, quand on la dérive, donne `0`, donc `z(t)=C_6`.
Étudions les conditions initiales de la situation pour déterminer les valeurs de ces trois
nouvelles constantes. Ces trois égalités sont vérifiées à chaque instant, notamment à l'instant `t=0`.
Réécrivons-les à cet instant :
`x(t=0)=C_4`
`y(t=0)=C_5` et
`z(t=0)=C_6`
Or nous avons indiqué dans la description initiale de la situation que
`x_0=0` et `y_0=H` et `z_0=0`
En comparant ces six égalités, nous pouvons identifier que
`C_4=0` et `C_5=H` puis enfin `C_6=0`
Finalement, nous obtenons les équations horaires des coordonnées du vecteur position :
`x(t)=v_0 \cdot cos(\alpha) \cdot t`
`y(t)=-1/2 \cdot g \cdot t^2 + v_0 \cdot sin(\alpha) \cdot t + H`
`z(t)=0`
La dernière égalité nous indique que le mouvement est contenu dans le plan (Oxy).
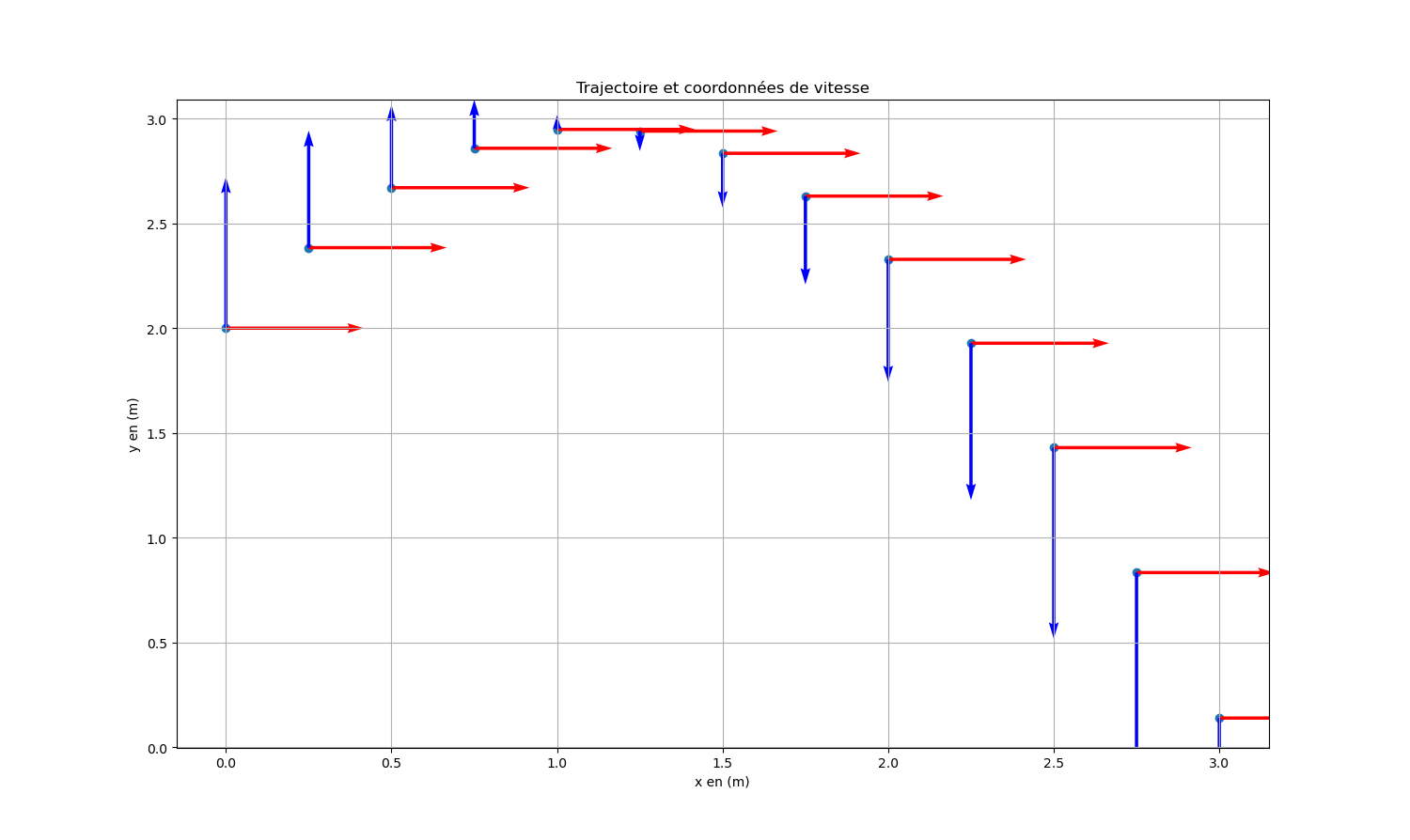
8. Équation de la trajectoire
Trajectoire parabolique
Nous disposons des équations horaires, c'est-à-dire au cours du temps. Nous souhaitons établir l'équation de la
trajectoire désormais, c'est-à-dire les positions des points successivement occupés par le système. Nous devons
pour cela établir la relation entre `y` et `x`, et non plus entre `y` et `t`.
De l'équation horaire `x(t)=v_0 \cdot cos(\alpha) \cdot t`, nous pouvons déduire que
`t=x/{v_0\cdot cos(\alpha)}`
Ainsi, dans l'expression de `y`, partout où nous voyons apparaître `t`, nous pouvons remplacer par
`x/{v_0\cdot cos(\alpha)}`, ce qui nous conduit à
Il s'agit de l'équation d'un polynôme du second degré : la trajectoire du système est une parabole concave.
Simulation numérique.
`H=2,0 m` ; `v_0 = 5,0 m//s` et `\alpha = 60°`
En rouge, coordonnée horizontale de la vitesse
En bleu, coordonnée verticale de la vitesse
Mouvement dans un champ électrique uniforme
1. Système et 2. référentiel
Dans cette partie, nous nous intéressons au mouvement d'une particule, de masse `m` et porteuse d'une charge
électrique `q` placée dans un champ électrique uniforme `\vecE`, tel qu'il en règne à l'intérieur des
condensateurs électriques. Ce champ admet en tout point du condensateur et à tout moment
les mêmes caractéristiques (direction, norme et sens). L'étude est menée dans le référentiel terrestre du laboratoire,
supposé galiléen.
3. Description de la situation initiale
Schéma de la situation initiale
La situation initiale peut varier d'une étude à l'autre : mouvement d'un électron, ou bien d'un proton (charge
opposée), particule éjectée par une armature ou bien qui pénètre dans le champ par un côté ouvert du condensateur,
vitesse initiale perpendiculaire aux plaques ou bien parallèle, etc.
Dans le cas présent, nous nous intéressons à un proton (charge positive) qui pénètre dans un condensateur disposé
horizontalement, la plaque + étant supérieure. Il est animé d'une vitesse initiale `\vec(v_0)` formant un angle
`\alpha` avec l'horizontale (voir figure). La situation est équipée d'un repère d'espace `(O\ ; \veci, \vecj, \veck)`
comme représenté, et d'une horloge qui indique `t=0` à l'instant où le proton pénètre dans le condensateur.
Comme précédemment, nous pouvons établir d'après la figure que les conditions initiales sont les suivantes :
Remarque : il est pertinent de s'entraîner à modifier la configuration de l'étude pour raisonner sur d'autres
conditions initiales. Le choix est fait ici de reproduire des conditions comparables entre les deux études pour
montrer les similitudes entre les deux situations. Il ne faudrait pas en faire une généralité, cela dit.
4. Bilan des forces
Le système est soumis, de façon exhaustive,
à l'action de la Terre, modélisée par son poids `\vecP`, vertical vers le bas ;
aux actions de l'air, comme les forces de frottements ou la poussée d'Archimède ;
aux actions des charges électriques portées sur les armatures, modélisées par une force unique
`\vecF=q\cdot \vecE`, colinéaire au champ électrique présent.
L'hypothèse est faite ici que la tension aux bornes des plaques est si grande, que le champ électrique est si grand, que
la force électrique est largement supérieure à toutes les autres, qu'on considère comme négligeables.
Remarque : ce n'est pas forcément le cas, ce qui peut faire l'objet d'autres expériences et exercices.
Ainsi, le bilan des forces se résume à la seule force d'origine électrique, `\vecF`. Notons que dans notre cas,
puisque le système étudié est un proton, donc porteur d'une charge électrique de signe positif, la force et le champ
sont orientés dans le même sens (`q>0`).
Nous savons donc précisément comment l'histoire débute. Nous allons exploiter la loi de Newton, qui est une loi
d'évolution, pour comprendre comment l'histoire se poursuit.
5. Principe fondamental de la dynamique
D'après la deuxième loi de Newton,
`\Sigma\vec(F_(ext))=m\cdot \vec(a_G)(t)`
soit ici, compte tenu du bilan des forces,
`\vecF=m\cdot \vec(a_G)(t)`
Compte tenu de l'expression de la force,
`q\cdot\vecE=m\cdot \vec(a_G)(t)`
En divisant membre à membre par la masse,
`\vec(a_G)={q\vecE}/m`
L'accélération du système est une constante dans le temps et dans l'espace. Compte tenu de
l'orientation du champ électrique, nous pouvons projeter l'égalité précédente et obtenir les
coordonnées du vecteur accélération :
`a_x=0`, mouvement uniforme sur (Ox)
`a_y=-{qE}/m`, mouvement uniformément varié sur (Oy)
`a_z=0`, mouvement uniforme sur (Oz)
6. Équations horaires de la vitesse du système
Nous connaissons les expressions des coordonnées de l'accélération, et par définition de la cinématique,
nous savons qu'il s'agit des dérivées des coordonnées de la vitesse par rapport au temps donc
`{dv_x(t)}/{dt}=0`
`{dv_y(t)}/{dt}=-{qE}/m`
`{dv_z(t)}/{dt}=0`
Comme cela a été fait dans l'étude précédente de chute libre, il faut désormais intégrer ces égalités, c'est-à-dire
retrouver `v_x(t)`, `v_y(t)` et `v_z(t)` en connaissant leurs dérivées. Cela donne :
`v_x(t)=C_1`
`v_x(t)=-{qE}/m\cdot t + C_2`
`v_z(t)=C_3`
Les trois constantes `C_1`, `C_2` et `C_3` sont des constantes d'intégration, dont nous allons pouvoir
déterminer les valeurs en raisonnant à partir des conditions initiales de l'étude.
Les lois horaires que nous venons d'établir sont vraies à n'importe quel instant `t>=0`. Elles sont notamment vraies
en `t=0` ; remplaçons donc partout `t` par `0` :
`v_x(t=0)=C_1`
`v_y(t=0)=-{qE}/m\cdot 0 + C_2 = C_2`
`v_z(t=0)=C_3`
Or, nous avons établi qu'initialement,
`v_(0x)=v_0\cdot cos(\alpha)`
`v_(0y)=v_0\cdot sin(\alpha)`
`v_(0z)=0`
donc en identifiant, nous obtenons,
`C_1=v_0\cdot cos(\alpha)`
`C_2=v_0\cdot sin(\alpha)`
`C_3=0`
Ainsi, les équations horaires de la vitesse sont
`v_x(t)=v_0\cdot cos(\alpha)`
`v_y(t)=-{qE}/m\cdot t + v_0\cdot sin(\alpha)`
`v_z(t)=0`
7. Équations horaires de la position du système
Connaissant les coordonnées de la vitesse, intégrons une fois encore pour trouver les coordonnées de la position
au cours du temps :
`{dx(t)}/{dt}=v_0\cdot cos(\alpha)`
`{dy(t)}/{dt}=-{qE}/m\cdot t + v_0\cdot sin(\alpha)`
`{dz(t)}/{dt}=0`
donc
`x(t)=v_0\cdot cos(\alpha)\cdot t + C_4`
`y(t)=-1/2\cdot {qE}/m\cdot t^2 + v_0\cdot sin(\alpha)\cdot t + C_5`
`z(t)=C_6`
Déterminons les valeurs des trois constantes d'intégration à l'aide des conditions initiales de l'étude :
`x(t=0)=C_4`
`y(t=0)=C_5`
`z(t=0)=C_6`
Or nous avons établi que
`\vec(OG_0)((0),(H),(0))`
donc `C_4=0`, `C_5=H` et `C_6=0` et les équations horaires de la position sont :
`x(t)=v_0\cdot cos(\alpha)\cdot t`
`y(t)=-1/2\cdot {qE}/m\cdot t^2 + v_0\cdot sin(\alpha)\cdot t + H`
`z(t)=0`
8. Équation de la trajectoire
À nouveau, connaissant `x(t)` et `y(t)`, nous souhaitons établir l'expression de `y(x)`. Comme
`x(t)=v_0\cdot cos(\alpha)\cdot t`, alors `t=x/{v_0\cdot cos(\alpha)}`, ce que nous pouvons injecter dans
l'expression de `y`, si bien que
`y(t)=-1/2\cdot {qE}/m\cdot {x^2}/{v_0^2\cdot cos(\alpha)^2} + tan(\alpha)\cdot x + H`
Il s'agit ici encore d'une équation du second degré : la trajectoire est parabolique et concave.
Nous avons donc observé, en comparant les deux études et sans surprise, que les mêmes causes engendrent les mêmes effets.
Il faudra toutefois se méfier, en général, des différences entre les deux études (orientation variable du condensateur,
signe positif ou négatif de la charge électrique, etc.).
Remarque : ce sont parfois les conditions finales, ou intermédiaires, qui sont connues dans ces problèmes.
Par exemple au tennis, il faut que la balle passe au-dessus du filet, phénomène qui a lieu vers le milieu de la
trajectoire. Au basket, il faut que le ballon passe par le panier. À la pétanque, il faut que la boule tombe
au sol à 12 m du lanceur par exemple, phénomène qui a lieu à la fin de la trajectoire, etc. Il faut alors tenir
compte de ces conditions-là pour déterminer les valeurs des constantes d'intégration, au lieu des conditions
initiales. Dans ce cas, la gymnastique à mettre en oeuvre réside dans la bonne mise en équation du problème, c'est-à-dire
traduire une phrase en français décrivant le problème en une équation mathématique : la boule de pétanque touche le
sol à 12 m du lanceur devient `y(x=12 m)=0`.
Aspects énergétiques
Les phénomènes et les lois étudiés dans les classes antérieures restent vrais. Pour étudier la chute d'un objet, deux voies
sont désormais disponibles : l'étude dynamique du système ou bien les bilans énergétiques, à l'aide, au choix, du théorème
de l'énergie cinétique ou du théorème de l'énergie mécanique.
Énergie potentielle électrique
La force électrique à l'oeuvre dans un condensateur tel que décrit ci-dessus est une force conservative.
À ce titre, elle dérive d'une énergie potentielle, qu'on appelle énergie potentielle électrique et qu'on note
`cc"E"_("élec")`. L'énergie potentielle d'une particule de charge `q` positionnée en un point de l'espace où règne un
potentiel électrique `V` vaut
`cc "E"_("élec")=q\cdot V`
La tension électrique `U_(AB)` entre deux points A et B de l'espace correspond à la différence de
potentiel entre les deux points : `U_(AB)=V_B-V_A`.
Ainsi, la variation d'énergie potentielle d'une particule entre deux points A et B d'un condensateur vaut :
Lorsqu'une particule n'est soumise qu'à la force électrique (ou que les autres sont négligeables), il est possible de
conduire un bilan énergétique entre deux points A et B de son mouvement à l'aide, par exemple, du théorème de
l'énergie mécanique, qui s'écrit ici, sans force conservative :
`\Delta_"AB"cc"E"_m=0`
donc `\Delta_"AB"cc"E"_"cin"+\Delta_"AB"cc"E"_"élec"=0`
soit `\Delta_"AB"cc"E"_"cin"=-\Delta_"AB"cc"E"_"élec"`
donc `1/2\cdotm\cdot (v_B^2-v_A^2)=-q\cdotU_AB`
La particule acquiert ou perd de l'énergie cinétique grâce au travail de la force électrique en jeu. C'est le
principe de fonctionnement des accélérateurs de particules et dans lesquels les particules sont portées à des
vitesses très importantes ; les faisceaux de particules sont ensuite braqués les uns vers les autres, ce qui
conduit à des collisions hautement énergétiques et à la dislocation des particules étudiées en particules plus
petites encore, qu'on détecte. Ainsi est sondée la matière à l'échelle de l'infiniment petit.