■ Les ondes se rangent en deux grandes catégories : les ondes mécaniques sont celles qui ne peuvent se
propager que dans un milieu matériel (air, eau, métal, roche, etc.). C'est le cas du son par exemple ou bien
des ondes sismiques. Les ondes électromagnétiques peuvent quant à elles voyager dans la matière (sous certaines
conditions, de transparence notamment) mais également dans le vide. C'est le cas des rayonnements infrarouges
ou ultraviolets, ou encore de la lumière (domaine visible du spectre).
■ Bien des ondes sont périodiques : l'ébranlement qu'elles provoquent se répète, tout à la fois
dans le temps pour un même point du milieu que dans l'espace à un même instant. On parle pour cela de la double
périodicité des ondes. La période temporelle est notée `T` et s'exprime en seconde. Son inverse, la fréquence,
se note `f` ou bien encore `\nu` ("nu") et s'exprime en hertz, de symbole Hz et `1 Hz=1 s^-1`.
La période spatiale s'appelle la longueur d'onde de l'onde, elle se note `\lambda` et s'exprime en mètre.
La vitesse de propagation de l'onde `v` obéit aux égalités `v=\lambda\cdot f` et `\lambda=v\cdotT`.
■ Un son est associé à une représentation temporelle, signal qu'on obtient par exemple à l'aide d'un
microphone et d'un logiciel de traitement du son. L'amplitude de ce signal est liée à l'intensité sonore notée
`I` et exprimée en watt par mètre carré (`W\cdot m^-2`). Le niveau d'intensité sonore, noté `L`, est une grandeur
davantage liée à la sensibilité de notre capteur, l'oreille, qui traduit la sensation sonore perçue. Il
s'exprime en décibels (dB). Le seuil d'audibilité d'un son correspond à `0 dB`, le seuil de danger
à `90 dB` et le seuil de douleurs à `110 dB`.
Onde sonore qui s'étale sur une sphère de plus en plus grande depuis une enceinte centrale
Définitions
Une source sonore génère du son, associé à une certaine quantité d'énergie mécanique qu'il transporte, par unité de temps.
La source sonore est donc caractérisée par sa puissance `cc P`. Le son émis peut alors voyager depuis sa source dans
toutes les directions de l'espace, bien souvent les trois, ce qui revient à dire que le front de l'onde s'étale
sur une sphère centrée sur la source, dont le diamètre augmente à mesure que le son progresse.
Il est donc possible de définir une puissance surfacique pour l'onde, c'est la puissance de l'onde répartie
sur l'aire de la surface qu'elle balaye dans l'espace. Cette puissance surfacique est appelée
l'intensité sonore :
`cc P_"surf"=I={cc P_"onde"}/{S}`
ce qui devient, dans le cas d'une surface sphérique de rayon `d`,
`I={cc P_"onde"}/{4\cdot \pi \cdot d^2}`
L'oreille humaine ne peut pas détecter des intensités sonores trop faibles. Il existe donc une intensité
sonore minimale détectable, qu'on appelle le seuil d'audition, noté `I_0`, dont la valeur est
`I_0=1\times10^-12 W\cdot m^-2`
Finalement, en termes de sensation auditive, le niveau d'intensité sonore `L` d'un son capté par l'oreille
est lié à l'intensité sonore par une relation logarithmique :
`L=10\cdot log(I/{I_0})`
Exemple d'une onde sonore dont l'intensité sonore est `I=1,00\times10^-9 W\cdot m^-2` :
Rappelons quelques propriétés de la fonction logarithme, définie sur `bbb R^(+ast)` :
`log(a\times b) = log(a) + log(b)`
`log(a/b) = log(a) - log(b)`
`log(1)=0`
`log(a)=c \Leftrightarrow a = 10^c`
Atténuation du son
L'atténuation du son désigne la différence de niveau d'intensité sonore qui existe entre deux points 1 et 2 du milieu.
`A = L_2-L_1`
Après une paroi, `L_2 < L_1`
Deux raisons peuvent expliquer l'atténuation d'un son :
par étalement de la surface de propagation de l'onde, qui se fait de plus en plus grande à
mesure que le son progresse. On parle alors d'atténuation géométrique. Si les points 1 et 2 du
milieu se trouvent respectivement à des distance `d_1` et `d_2` de la source, alors
`A=20\cdot log({d_1}/{d_2})`
Cette relation peut être redémontrée à l'aide des définitions fournies ci-dessus ;
par absorption de l'énergie mécanique de l'onde sonore au travers d'un milieu insonorisant.
La capacité d'un milieu à insonoriser dépend de son épaisseur `e`, et aussi de sa composition
qui lui confère un coefficient d'atténuation linéique `\alpha=A/e`, exprimé en `dB//m`.
Diffraction
Définition
Diffraction par un trou
La diffraction est un phénomène ondulatoire qui consiste en un étalement de la direction de propagation
d'une onde une fois qu'elle a franchi une contrainte dans le milieu matériel (une fente ou un obstacle). Ce phénomène
peut être observé aussi bien dans le cas d'ondes mécaniques que dans celui d'ondes électromagnétiques, y compris avec
de la lumière.
Par diffraction, certains points du milieu matériel sont ainsi touchés par l'onde en aval de l'obstacle bien qu'ils ne
soient pas placés dans son alignement.
Diffraction à la surface de l'eau
Par exemple, la diffraction peut s'observer au bord de la mer à l'extrémité d'une digue ou à l'entrée d'une anse.
Les vagues qui forment en amont un front d'onde rectiligne s'étalent au franchissement de l'obstacle et
viennent perturber la surface de l'eau en dessinant désormais des arcs de cercle.
Conditions d'observation
Angle caractéristique de diffraction
On appelle angle caractéristique et on note `\theta` ("théta") le demi-angle formé par le phénomène et
dans lequel les ondes s'étalent après l'obstacle. L'extention spatiale de l'obstacle (ou du trou) est notée `a`.
La longueur d'onde des ondes qui voyagent est, comme toujours, notée `\lambda`.
Ces grandeurs sont reliées entre elles par la relation suivante :
`\theta=\lambda/a`
où `\theta` s'exprime en radians.
La diffraction s'observe si l'extension de l'obsctale est de l'ordre de la longueur d'onde,
ou inférieur :`\a \approx \lambda` ou `a < \lambda`.
Nous pouvons observer sur la figure précédente que l'onde résultante à la sortie de l'obstacle présente
par endroit une amplitude importante (zone marquée par une alternance de stries noires et blanches bien
distinctes), séparées entre elles par des directions de l'espace où l'amplitude est faible (zones grises,
repérées sur la figure par des traits verts). Ces zones de faible amplitude sont appelées des extinctions.
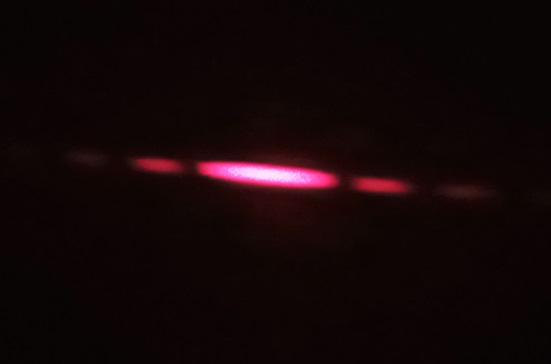
Figure de diffraction lumineuse
Voici la figure obtenue sur un écran lorsqu'un faisceau laser monochromatique rouge est contraint de traverser
une fente disposée verticalement (donc sans contrainte verticale, mais avec un resserrement horizontal).
Cette figure de diffraction illustre bien, grâce à ses taches, les zones de forte amplitude et les zones d'extinction.
La figure est symétrique. Les extinctions sont régulièrement espacées. La tache centrale est deux fois plus
large que les taches secondaires (par symétrie).
Géométrie de la situation
Géométrie de la figure de diffraction
La largeur de la tache centrale, mesurée sur l'écran, est notée `L`. L'écran est séparé de la fente
par une distance `D` très grande devant toutes les autres dimensions du problème. Expérimentalement,
de l'ordre du mètre. Dans ces circonstances, l'angle `\theta` est petit.
Relions entre elles les dimensions de la situation :
d'après la relation citée ci-dessus, `\theta=\lambda/a` ;
Dans l'approximation des petits angles, `tan(\theta)\approx\theta` si bien que ;
`{(\theta=\lambda/a),(\theta=L/{2D}):}`
Ainsi,
`\lambda/a=L/{2D}`
Cette relation pourra être vérifiée expérimentalement, en étudiant la largeur de la tache centrale en
fonction de l'inverse de la largeur de la fente :
`L=2\lambda D\cdot 1/a`
Interférences
Définitions
Les interférences sont un phénomène là aussi commun à toutes les ondes, qu'elles soient mécaniques ou
électromagnétiques, qui s'observe lorsque des ondes cohérentes, issues de différentes sources, se superposent
en un même point de l'espace. Nous restreignons l'étude à deux sources ponctuelles.
La superposition de deux fronts d'onde conduit à certains lieux de l'espace où l'effet de la première onde
amplifie celui de la deuxième, et à d'autres endroits où l'effet de l'une annule l'effet de l'autre.
Deux sources sont cohérentes si elles émettent des ondes de même fréquence et si l'éventuel
retard de l'une par rapport à l'autre ne varie pas dans le temps. Nous étudierons en particulier ici
des sources synchrones, c'est-à-dire qui n'ont pas de retard entre elles. Nous dirons alors
que les sources vibrent en phase.
Illustration des interférences à la surface de l'eau
Expérimentalement, pour obtenir deux sources cohérentes, il est encore possible de préparer une source d'onde
et de la séparer en deux. On emploie par exemple pour cela un obstacle percé de deux petits trous :
chaque trou est alors une source secondaire, cohérente avec la source du trou voisin, puisqu'elles vibrent
à partir d'une même onde source disposée en amont.
Schéma de la situation
Nous nous appuyons sur l'exemple de la vidéo précédente où deux ballons viennent frapper en même temps et en rythme
la surface de l'eau d'un lac. Les deux ballons jouent le rôles des deux sources d'ondes `S_1` et `S_2` qui vibrent
en phase et qui émettent, régulièrement, des fronts d'onde circulaires qui se propagent à la surface de l'eau. Nous
faisons l'hypothèse que les deux ondes vibrent de façon sinusoïdale.
Nous nous intéressons à ce qui se passe en un point M quelconque du milieu matériel.
Retard
L'onde issue de `S_1` atteindra le point M après une durée `\Delta t_1`. L'onde issue de `S_2` atteindra le
point M après une durée `\Delta t_2`. On appelle retard et on note `\tau` la différence entre ces deux durées :
`\tau=\Delta t_1 - \Delta t_2`
Différence de marche
Pour rejoindre le point M, l'onde issue de `S_1` doit parcourir la distance `S_1M`. Pour rejoindre le point M,
l'onde issue de `S_2` doit parcourir la distance `S_2M`. On appelle différence de marche et on note
`\delta` la différence entre ces deux longueurs :
`\delta = S_1M-S_2M`
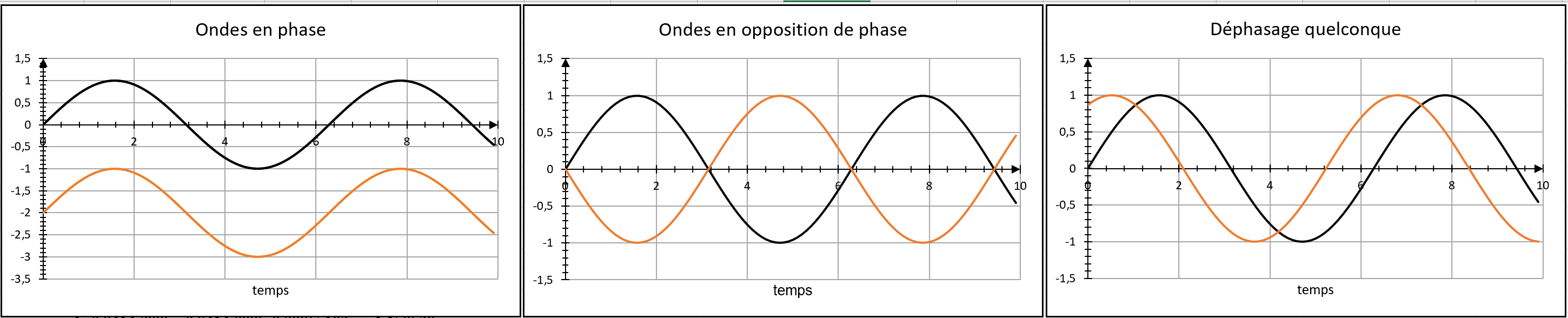
Déphasage
Le déphasage entre deux ondes sinusoïdales se manifeste par le glissement relatif entre les courbes
représentatives des ébranlements liés aux deux ondes en un même point de l'espace au cours du temps.
Trois situations de déphasage. Les deux ondes en phase ont été artificiellement
décalées à la verticale pour mieux les distinguer.
Dans le cas des ondes en phases, quand l'une admet son maximum, l'autre aussi. Quand l'une admet son minimum,
l'autre aussi.
Dans le cas des ondes en opposition de phases, quand l'une admet son maximum, l'autre admet son minimum.
Notez que dans dans les trois cas de figure, si on opère un glissement de la courbe représentative orange
vers la droite sur une durée d'une période, alors les deux ondes se retrouvent avec le même déphasage qu'au
départ.
Interférences constructives et destructives
Nous souhaitons comprendre comment les ondes interagissent et se superposent en un point M quelconque de la
surface de l'eau.
Les fronts d'onde issus de `S_1` et de `S_2` sont générés au même moment sur chaque point source. Ils voyagent à la
même vitesse à la surface de l'eau.
Si, en un point M, les deux fronts d'onde arrivent avec un retard `\tau=0` ou `\tau=T` ou `\tau=2T`, etc.,
les deux fronts d'onde arrivent en M en phase, l'élévation de l'onde 1 s'ajoute à l'élévation de l'onde 2,
le creux de l'onde 1 s'enfonce dans le creux de l'onde 2. Le point M subit alors un ébranlement deux fois
plus ample qu'en présence d'une onde unique. Les interférences sont constructives.
Généralisons :
Un point M du milieu est le lieu d'interférences constructives des ondes issues de `S_1` et `S_2` si en
ce point, leur retard est un multiple pair de la demi-période : `tau=(2k)\cdotT/2` où `k in ZZ.`
Si, en un point M, les deux fronts d'onde arrivent avec un retard `\tau=T/2` ou `\tau=3T/2` ou `\tau=5T/2`, etc.,
les deux fronts d'onde arrivent en M en opposition de phase : l'élévation d'une onde est compensée par le creux de
l'autre onde, leurs effets s'annulent, le point M n'est soumis à aucun ébranlement, il demeure au repos.
Les interférences sont destructives.
Généralisons :
Un point M du milieu est le lieu d'interférences destructives des ondes issues de `S_1` et `S_2` si en
ce point, leur retard est un multiple impair de la demi-période : `\tau=(2k+1)\cdot T/2` où `k in ZZ`.
Il est également possible de raisonner sur le parcours des ondes, plutôt qu'en termes de retard.
Considérons qu'en un point M, les interférences soient constructives :
`\tau_M=(2k)\cdotT/2`
Explicitons ce retard :
`\Delta t_"1M"-\Delta t_"2M"=(2k)\cdot T/2`
Multiplions membre à membre par la vitesse de l'onde :
En M, la différence de marche est donc un multiple pair de la demi-longueur d'onde.
Généralisons :
Un point M est le lieu d'interférences constructives des ondes issues de `S_1` et `S_2` si en ce point
la différence de marche est un multiple pair de la demi-longueur d'onde :
`\delta=(2k)\cdot \lambda/2` où `k in ZZ`.
et
Un point M est le lieu d'interférences destructives des ondes issues de `S_1` et `S_2` si en ce point
la différence de marche est un multiple impair de la demi-longueur d'onde :
`\delta=(2k+1)\cdot \lambda/2` où `k in ZZ`.
Étude en particulier des ondes lumineuses
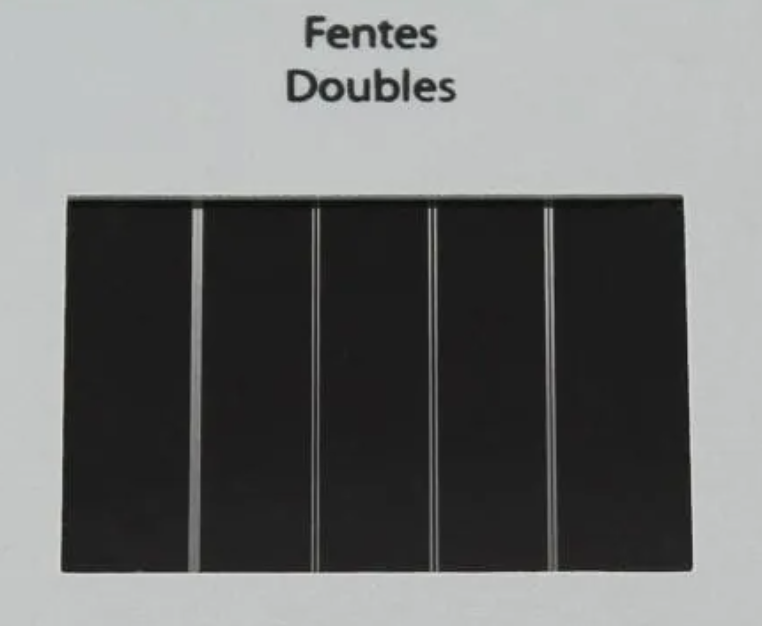
Diapositive munie de 4 bifentes
Le cas des ondes lumineuses peut être étudié en obtenant deux sources lumineuses cohérentes, ce qui se réalise
par division du front d'onde à l'aide de bifentes d'Young ou fentes doubles.
Chaque fente possède une largeur `a` et elles sont séparées entre elles par une distance inter-fente notée `b`.
Un écran lumineux est placé à une distance `D` grande devant toutes les autres longueurs de l'expérience.
L'écran est muni d'un axe `(Ox)` pour y mesurer la position des différents éléments de la figure d'interférences.
L'écran présente toujours une tache centrale de diffraction, car les ondes lumineuses ont été contraintes à passer
dans des fentes, mais comme il y a deux fentes, chacune joue le rôle de `S_1` et `S_2` donc la tache de
diffraction est striée de franges alternativement lumineuses (où lumière + lumière = lumière, lieux
d'interférences constructives) et sombres (où lumière + lumière = noir, lieux d'interférences destructives).
Dans le cas des ondes lumineuses, la différence de marche se calcule en pondérant la longueur du parcours suivi
par la valeur de l'indice de réfraction `n` du milieu parcouru :
`\delta =n\cdot(S_1M-S_2M)`
Dans le cas des bifentes d'Young, la différence de marche en un point M d'abscisse `x` entre les deux ondes issues
de `S_1` et `S_2` est donnée par :
`\delta = {n\cdot b\cdot x}/D`
On appelle interfrange et on note `i` la distance qui sépare deux franges brillantes successives (ou bien
de façon équivalente, deux franges sombres). Déterminons son expression :
Considérons un point M lieu d'interférences constructives donc
`\delta_M=(2k)\cdot \lambda/2`
`{n\cdot b\cdot x_M}/D = (2k)\cdot \lambda/2`
`x_M=k\cdot{\lambda\cdotD}/{n\cdot b}`
Considérons désormais le point N, premier lieu voisin de M d'interférences constructives :
`\delta_N=(2(k+1))\cdot \lambda/2`
`{n\cdot b\cdot x_N}/D=(2(k + 1))\cdot \lambda/2`
`x_N=(k+1)\cdot{\lambda\cdotD}/{n\cdotb}`
Par définition, `i=x_N-x_M` donc
`i={\lambda\cdotD}/{n\cdotb}`
Cette relation pourra être vérifiée expérimentalement en mesurant l'interfrange obtenu à l'aide de
bifentes plus ou moins espacées et en étudiant `i=f(1/b)`.
Effet Doppler
Définitions
Le camion est immobile dans le référentiel de la route
L'effet Doppler est un phénomène ondulatoire selon lequel la fréquence qu'on observateur perçoit d'une onde est
différente selon son état de mouvement dans le référentiel de la source. Il se manisfeste par exemple le plus
fréquemment dans la rue au passage d'un véhicule muni d'une sirène (camion de pompier, ambulance) et qui semble
produire une note plus grave ou plus aigu selon qu'il s'approche ou qu'il s'éloigne de nous.
Nous restreignons l'étude à un mouvement uniforme unidirectionnel (l'émetteur donc le camion voyage sur un axe), le référentiel choisi
est terrestre, fixé au bord de la route. Le récepteur (le piéton) est immobile sur le trottoir.
La sirène émet une onde sonore périodique. Dans le référentiel du camion, cette onde a une période `T_E`, une fréquence `f_E` et une
longueur d'onde `\lambda_E`. Ce sont les période, fréquence et longueur d'onde qu'un observateur mesure également
lorsque le camion est immobile dans le référentiel de la route.
On notera `T_R`, `f_R` et `\lambda_R` les période, fréquence et longueur d'onde reçues par le récepteur.
L'émetteur s'approche du récepteur
Le camion s'approche du piéton
Désormais le camion est animé d'une vitesse `\vecv` constante dans le référentiel de la route, inférieure à la
célérité `c` des ondes. Trois photographies
de la situation sont compilées dans la figure suivante :
à la date `t_0`, un premier front d'onde a été émis, artificiellement coloré en rouge ;
le camion avance, puis à la date `t_0+T_E`, donc après une période, un deuxième front d'onde
a été émis, artificiellement coloré en vert. Dans l'intervalle, le front rouge s'est propagé de façon
concentrique autour du point source de la photo précédente ;
à la date `t_0+2T_E`, le camion a encore avancé, un troisième front d'onde a été émis, artificiellement
coloré en bleu. Dans l'intervalle, le front rouge a continué son expansion, le front vert a entamé la sienne
de façon concentrique autour de son point source sur la deuxième photo, etc.
Nous observons que les fronts d'onde se tassent à l'avant du véhicule. Le récepteur (le piéton) va
donc recevoir des fronts d'onde régulièrement espacés, mais avec un intervalle d'espace très petit entre eux.
Les front d'onde sont tassés à l'avant
Zoomons sur les fronts d'onde à l'avant du camion :
Pour l'observateur, les fronts d'onde qui lui parviennent sont séparés entre eux par la longueur d'onde `\lambda_R`.
Cette longueur d'onde correspond à la longueur d'onde au repos, `\lambda_E`, à laquelle il faut soustraire la distance
dont la source a pu s'approcher entre deux photos. Or la source avance à la vitesse `v` et entre deux photos, il
s'écoule une durée `T_E` donc
`\lambda_R=\lambda_E-v\cdotT_E`
En notant `c` la célérité des ondes, et puisque `c=\lambda\cdotf`,
`c/{f_R}=c/{f_E}-v/{f_E}`
donc en écrivant le membre de droite au même dénominateur,
`c/{f_R}={c-v}/{f_E}`
Inversons membre à membre,
`{f_R}/c={f_E}/{c-v}`
et multiplions finalement par `c` membre à membre :
`f_R=f_E\cdot c/{c-v}`
Puisque `c-v` est obligatoirement plus petit que `c` tout court, le quotient `c/{c-v}` est plus grand que 1 donc
`f_R>f_E` : l'observateur perçoit un son plus aigu que dans le cas d'un camion immobile.
Calculons le décalage Doppler `\Deltaf_R=f_R-f_E` dans le cas où le véhicule avance bien moins vite que les ondes (`v≪ c`).
`\Deltaf_R=f_E\cdot c/{c-v} - f_E`
Factorisons
`\Deltaf_R=f_E\cdot(c/{c-v} - 1)`
Réduisons au même dénominateur
`\Deltaf_R=f_E\cdot(c/{c-v} - {c-v}/{c-v})`
Simplifions
`\Deltaf_R=f_E\cdot v/{c-v}`
et comme `v≪ c`, `c-v\approx c` donc
`\Deltaf_R=f_E\cdot v/c`
Le décalage Doppler est donc proportionnel à la vitesse de l'émetteur dans le référentiel du récepteur. Cette information
est très utile pour déterminer la vitesse d'un véhicule par exemple en mesurant les fréquences.
L'émetteur s'éloigne du récepteur
On considère désormais la situation où le camion a dépassé le piéton, donc le camion s'éloigne.
S'approcher à la vitesse `v`, c'est s'éloigner à la vitesse `-v`. Cette deuxième étude est donc très simple à conduire
à la suite de la première, il suffit de remplacer tous les `v` par des `-v`.
Ainsi, sans plus de démonstration, en phase d'éloignement,
`\lambda_R=\lambda_E+v\cdot T_E`
puis
`f_R=f_E\cdot c/{c+v}`
Cette fois, le récepteur détecte un son plus grave que dans le cas d'un émetteur au repos. Enfin, concernant le décalage
Doppler,